Video
Abstract
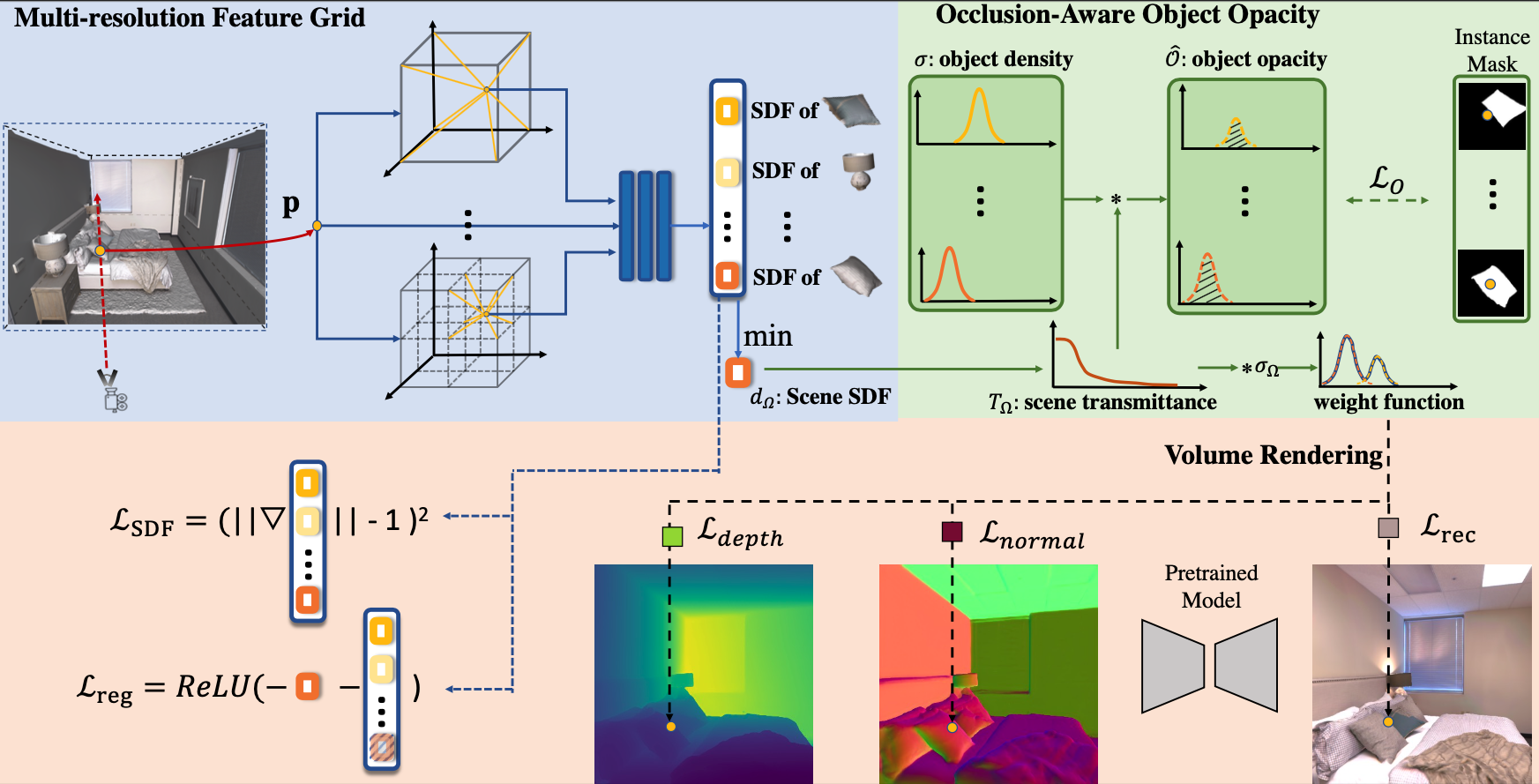
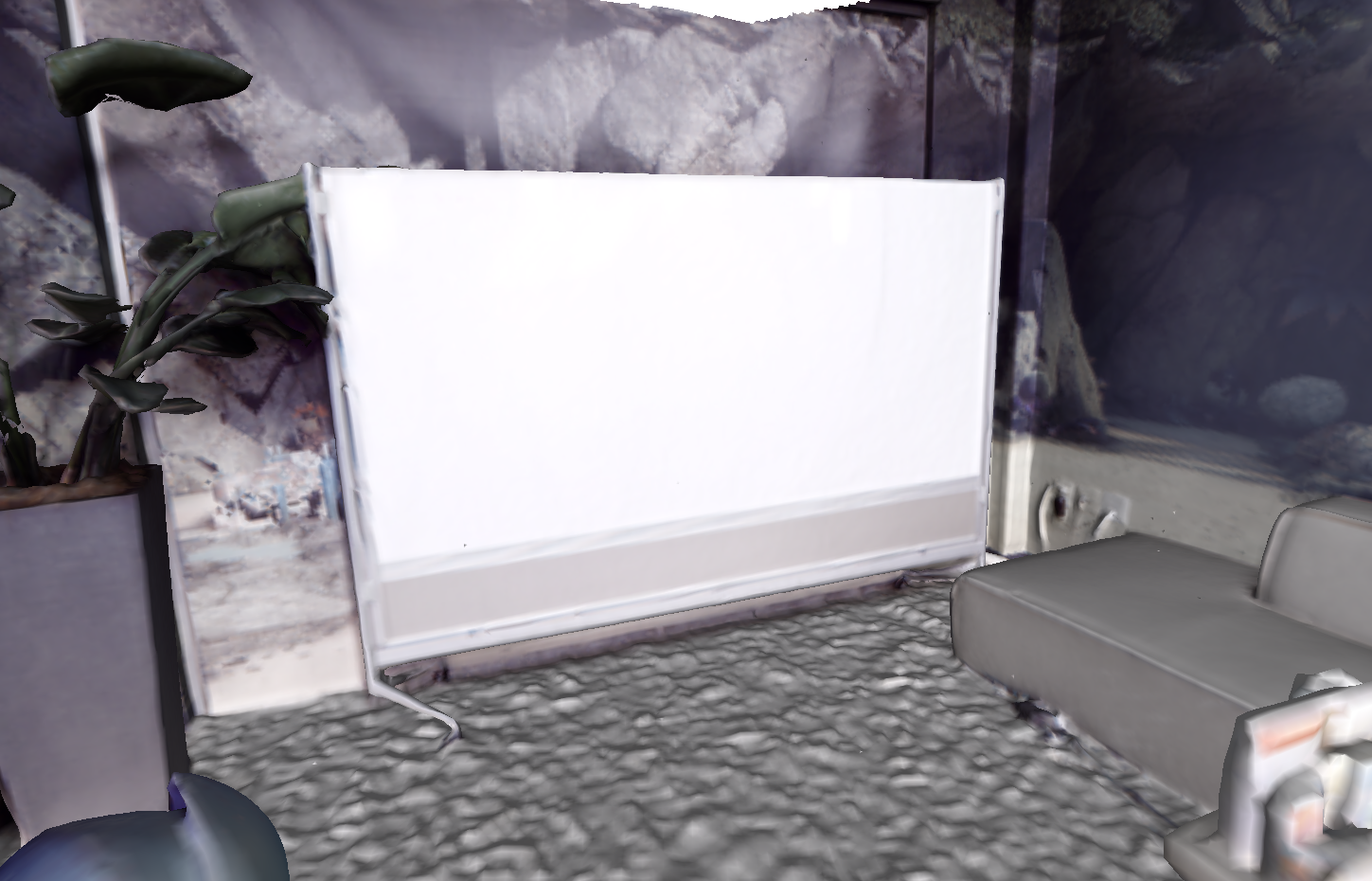
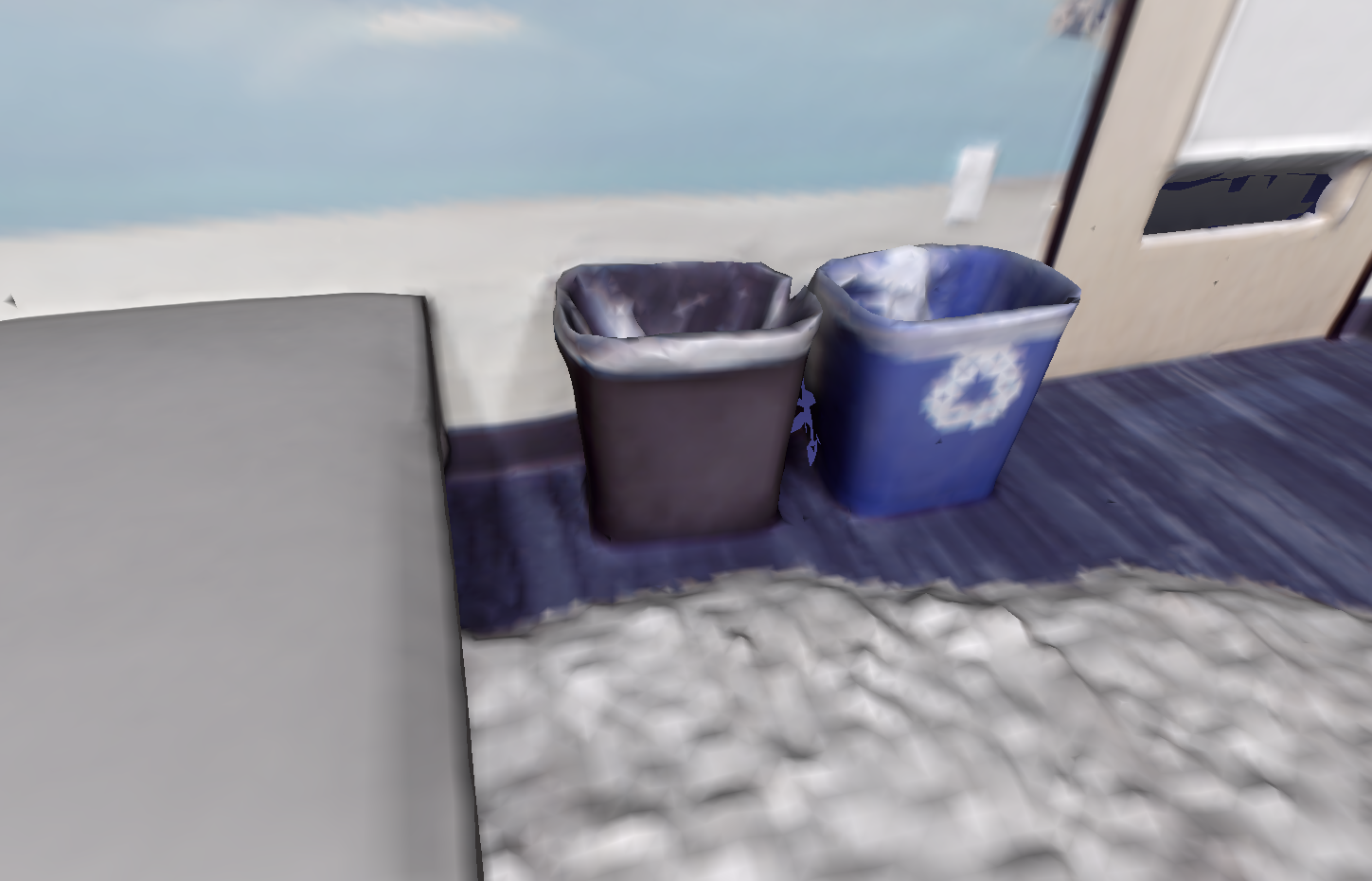
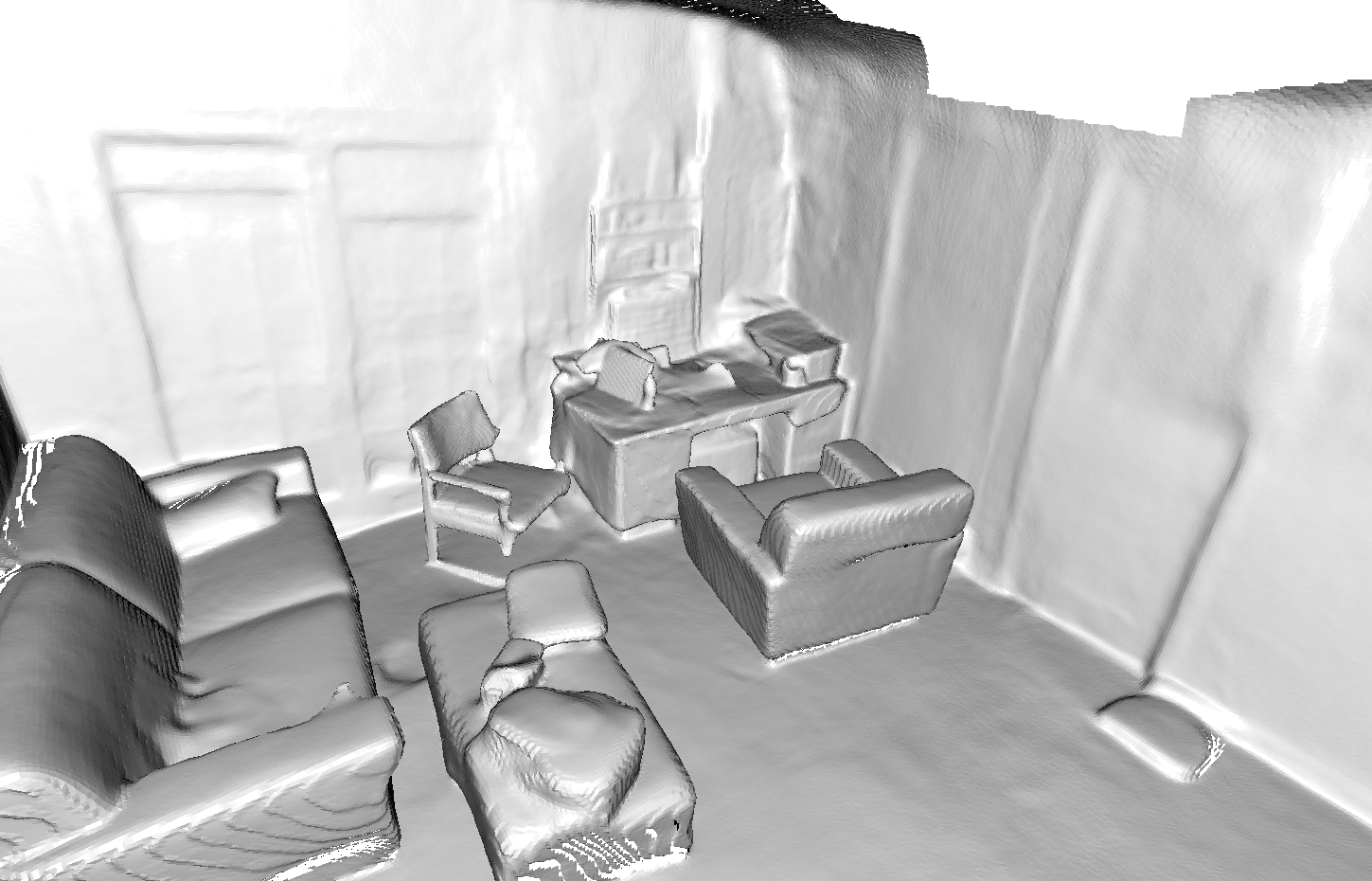
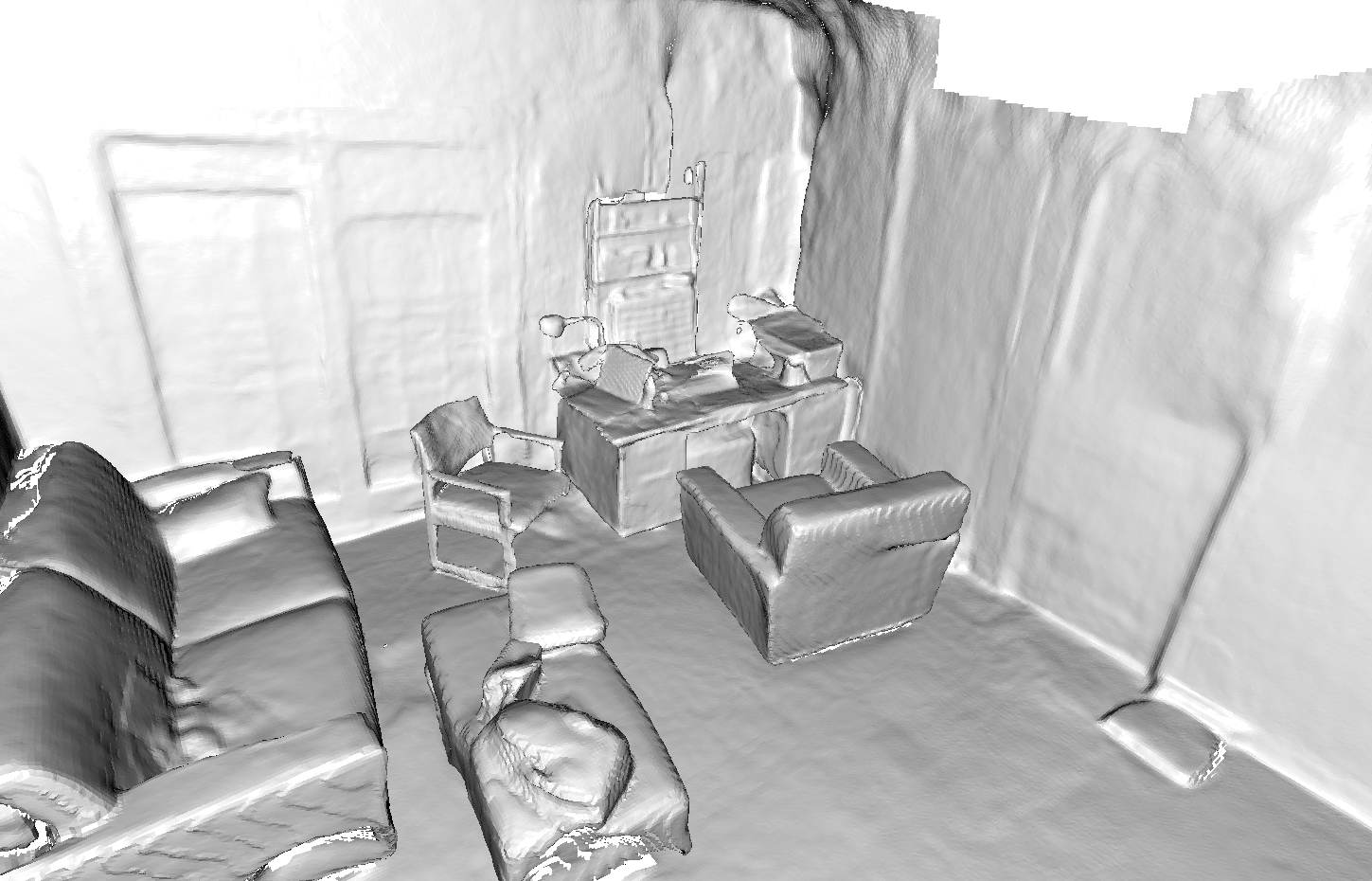
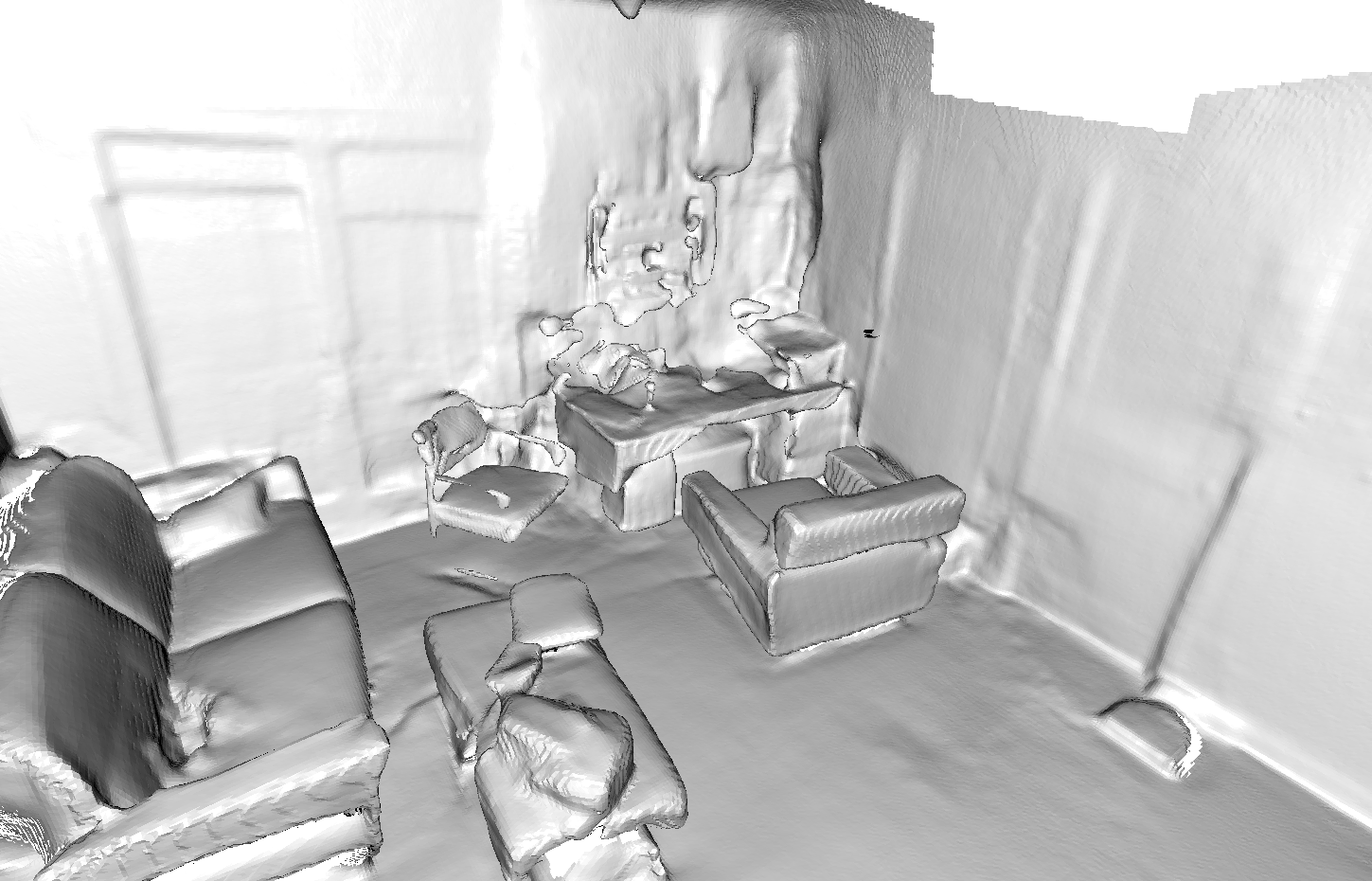
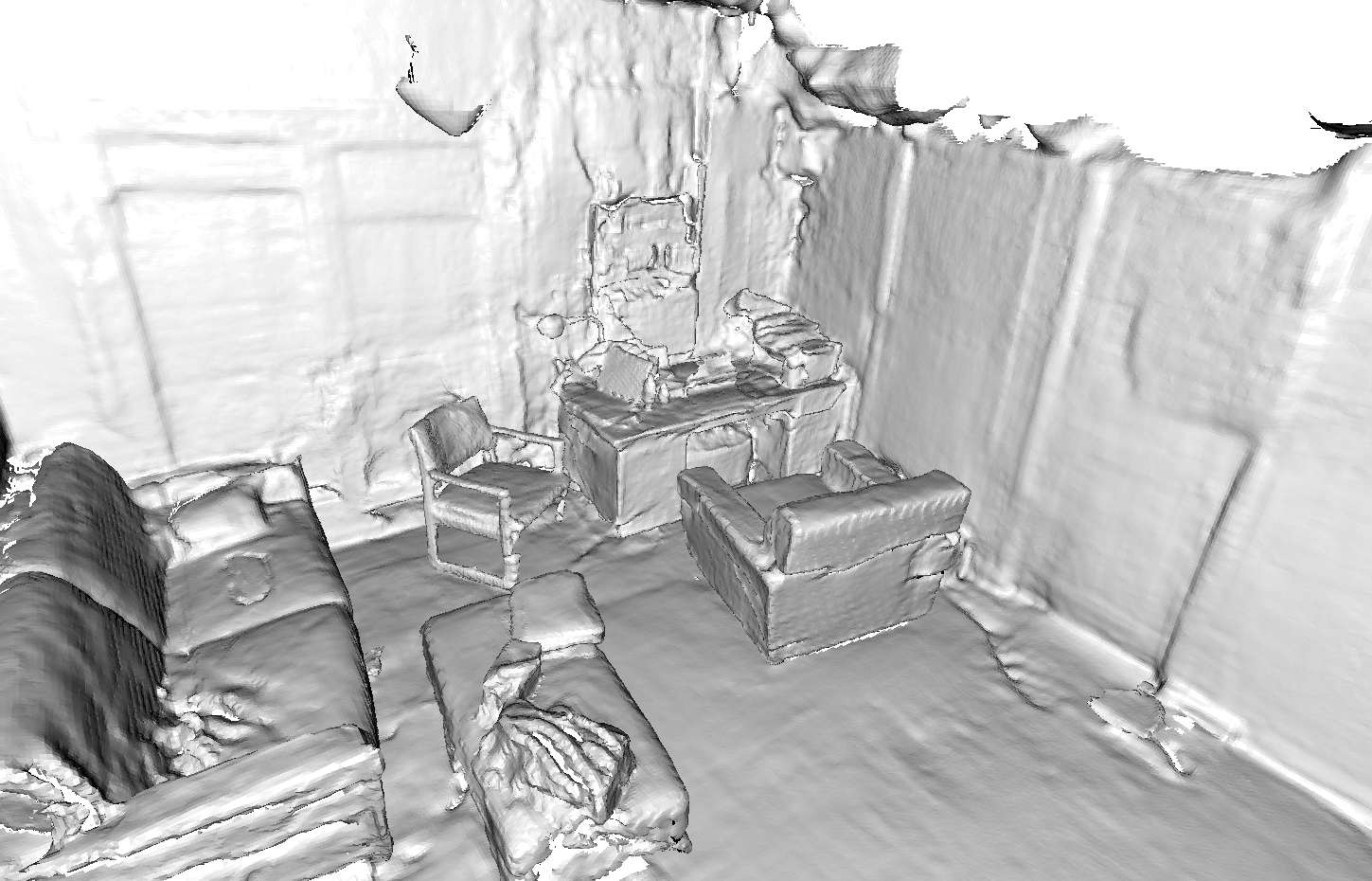
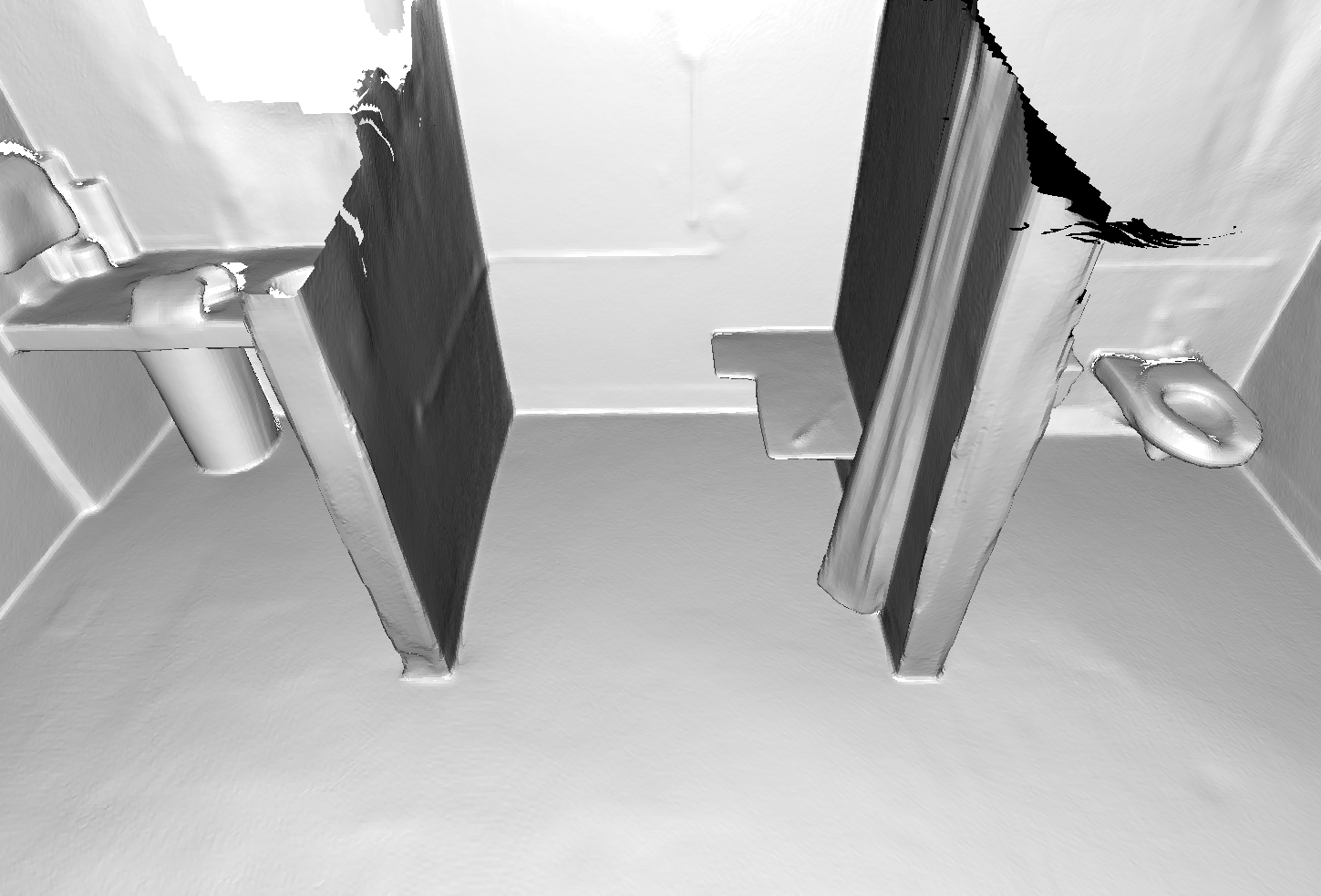
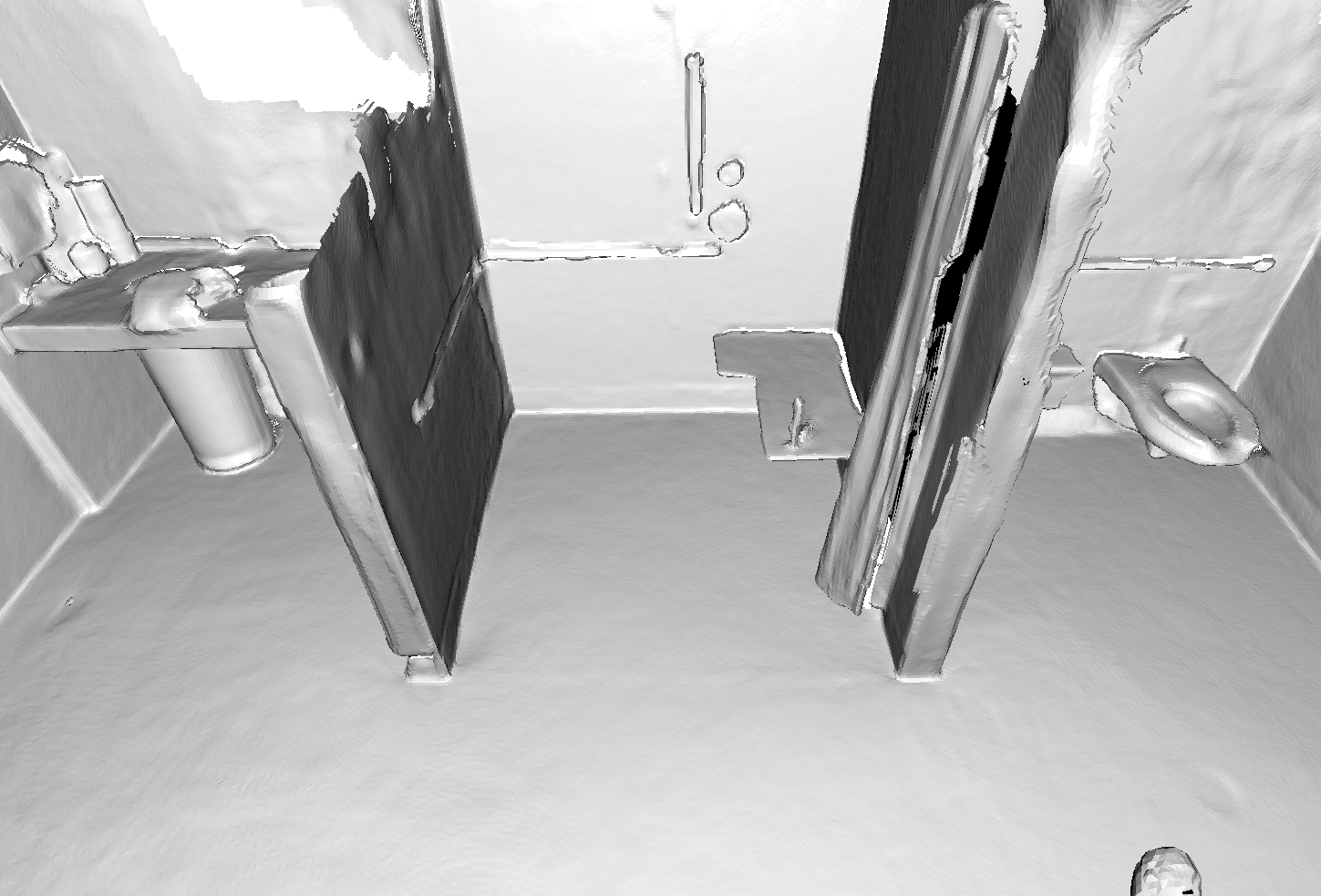
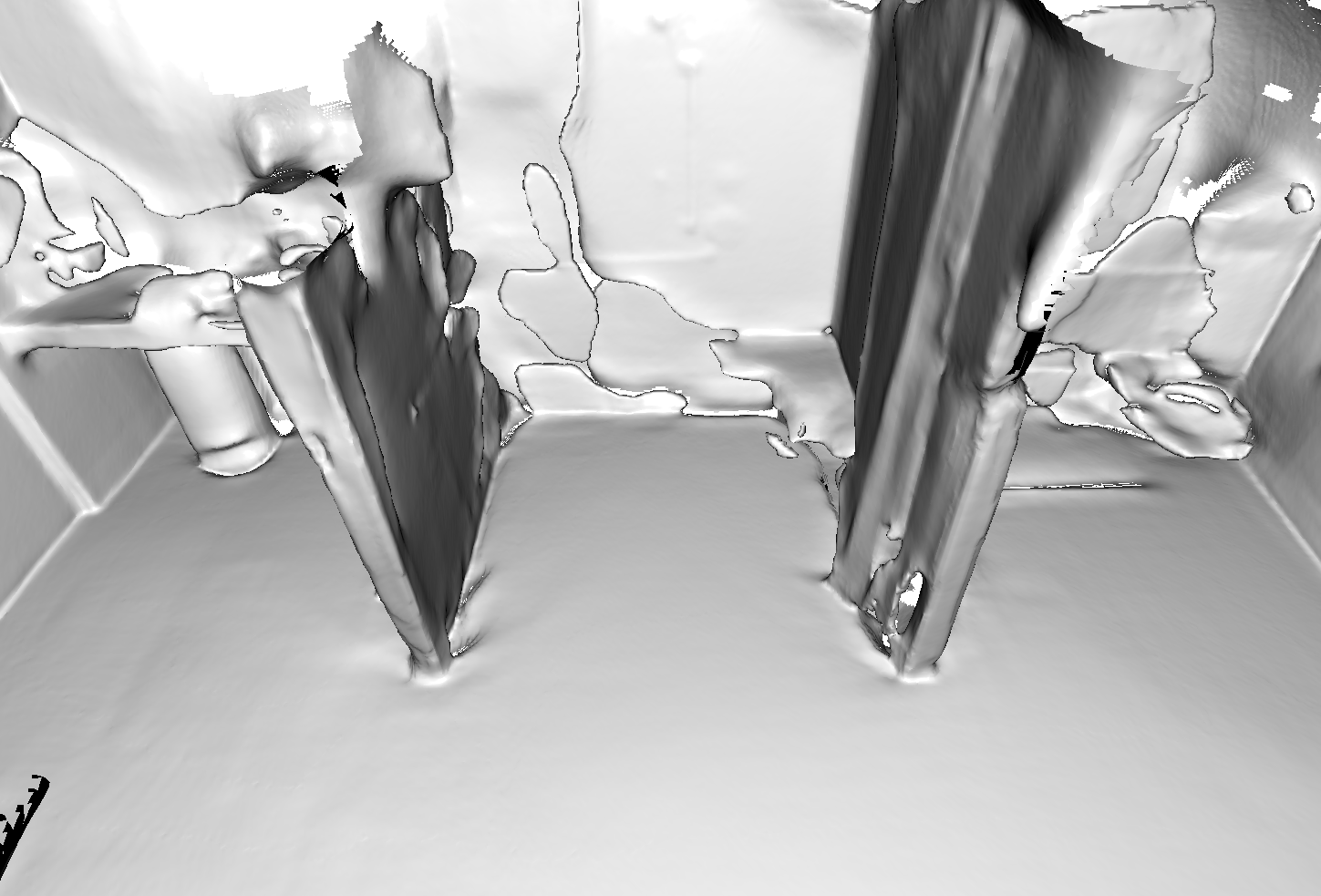
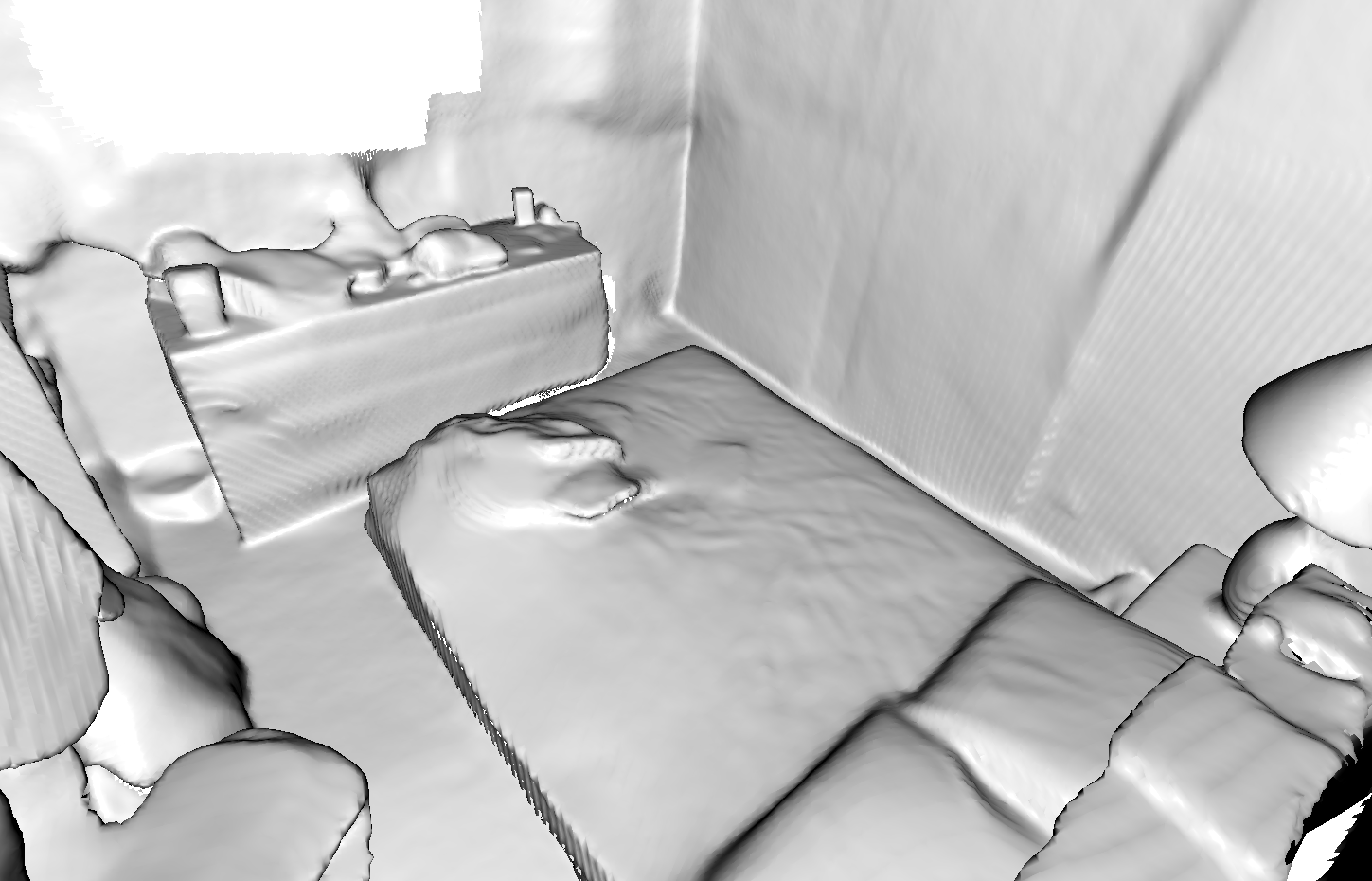
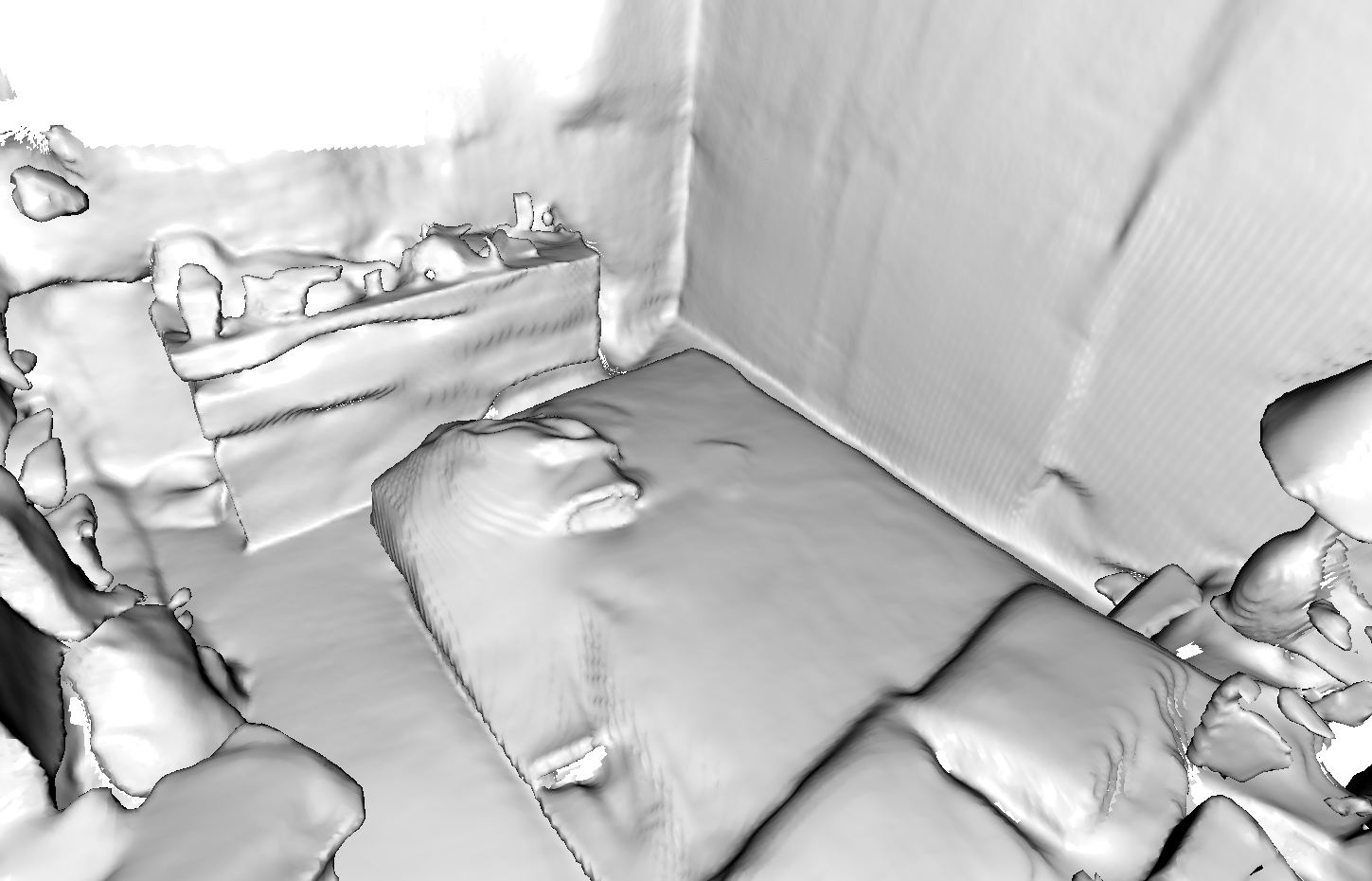
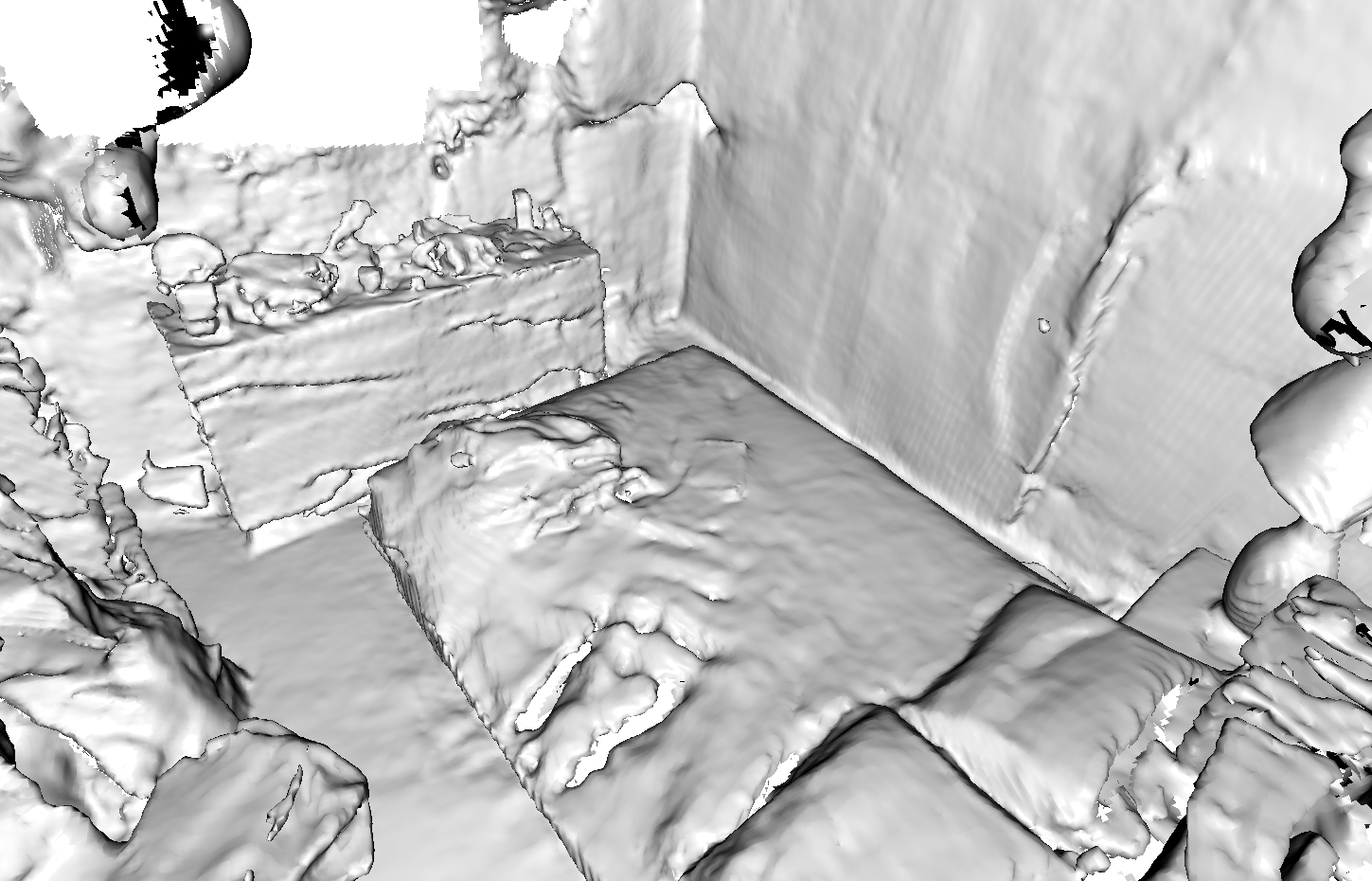
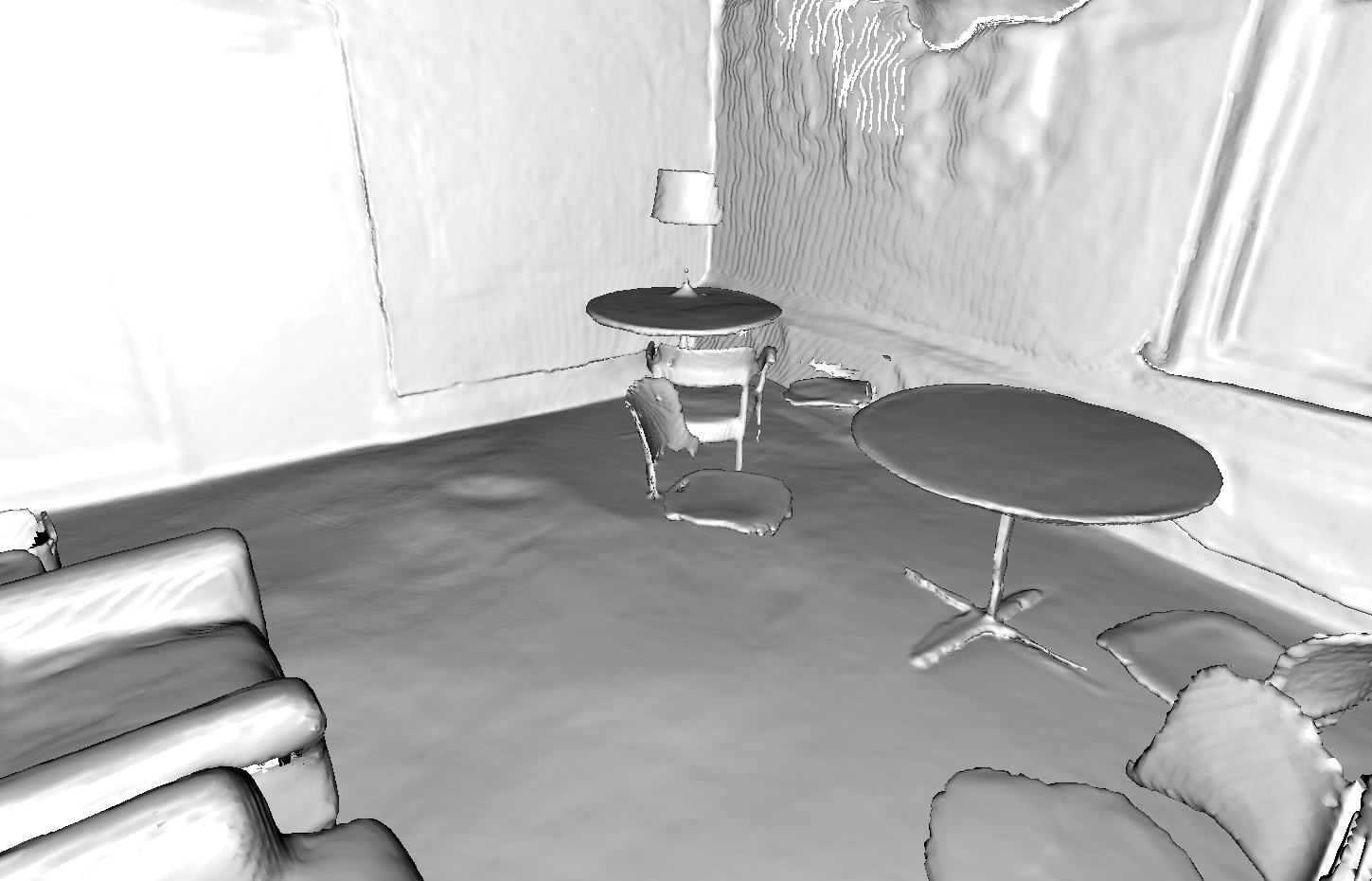
TL;DR: A scene is composited by various objects. Therefore, we present ObjectSDF++, an improved neural implicit surfaces framework that reconstruct each object surface simultaneously from multiview images with instance mask guidance.
ObjectSDF++ is a new framework for neural implicit surface reconstruction that focuses on object-compositional scene, enhancing both object and scene reconstruction quality. The method introduces an occlusion-aware object opacity rendering formulation, which directly volume-renders object opacity supervised by instance masks. Additionally, ObjectSDF++ incorporates a novel regularization term for object distinction, effectively addressing the issue of unexpected reconstructions in invisible regions. These improvements make ObjectSDF++ producing high-quality 3D reconstruction results.